
Golaem Crowd
Feature Film Quality on a TV budget
Golaem helps you to populate shots in a short amount of time and with limited budget.
Built with the artist in mind, Golaem automates repetitive and cumbersome tasks to let them focus on their art.
The Golaem workflow is built so that although it relies on AI, artists always get their last word to say and can keep total control of the results.
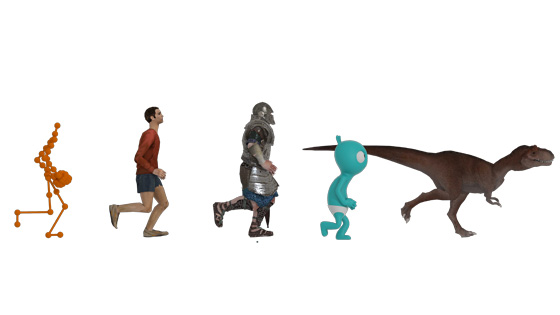
Create Believable Characters
Golaem makes your shots more realistic by generating variations for you:
- Visual variations
- Animation variations
- Behavioral variations
variations


Avoid Repetitive Work
Having characters walking around in your scenes is a piece of cake. It takes only a few minutes.
They can be influenced by simple triggers like zone, time, distance, collision... and automatically adapt to the ground, even if it changes every day!
More about behaviorsUse Golaem Assets or your own
Start rendering shots today thanks to the Golaem Assets, a set of ready-to-use character models and motions for stadiums, city street or medieval battles.
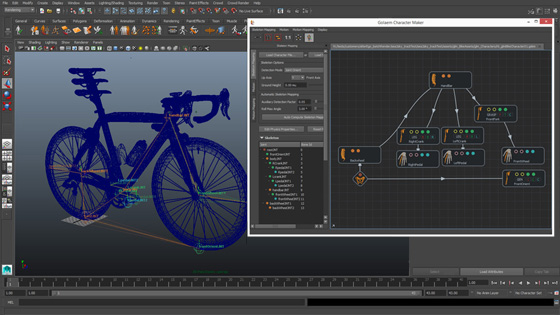
Use your custom characters and motions with Golaem. Animate any type of characters: humans, horses & riders, insects, bicycles, robots...
The Golaem workflow is so flexible that you can even start with Golaem assets and replace them by your own later.
More aboutGolaem assets More about animation
Save assets production time
Golaem reduces the amount of motion capture you need to carry out for your project.
Re-use motions from previous productions. Customize them by simply mixing them with a new simple animation. Adjust them with procedural animation.
More about animationFrom 1 to 100 000 characters
Do not bother about the number of people in your viewport. Whatever the number of characters you are dealing with, you can keep working comfortably, with an interactive viewport, full previsualization and a small scene file.
More aboutworkflow

Keep artistic control
Although it relies on AI to save you an unbelievable amount of time, Golaem always lets you have the final say.
Achieve precise control over placement, shading, navigation... with the Paint Tool or even modify simulation results with the Layout tool.
More aboutworkflow
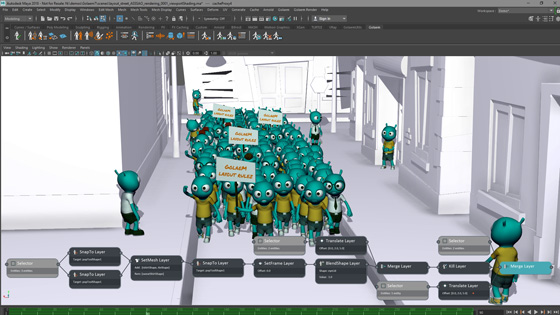
Easy scene sharing & Retakes
Golaem Layout is included with your Golaem license.
Visualize simulation results. Take full control to get a shot from good to perfect. Create a whole scene without even running a simulation.
Easily share scenes with other departments or other studios. Optimize the production workflow (e.g. senior artists in charge of simulations, juniors in charge of layout and retakes).
More aboutGolaem Layout
Quick Learning Curve
Because it is so user-friendly, Golaem is very fast to learn.
We have heard stories of runners contributing to crowd shots for feature films after a few days.
testimonials
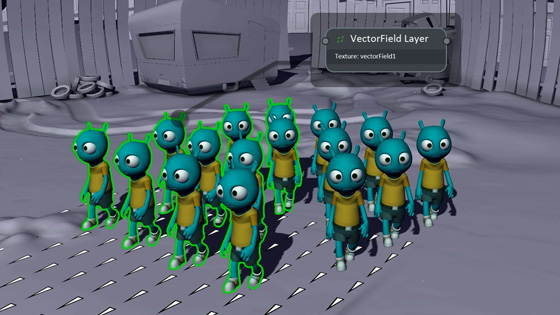
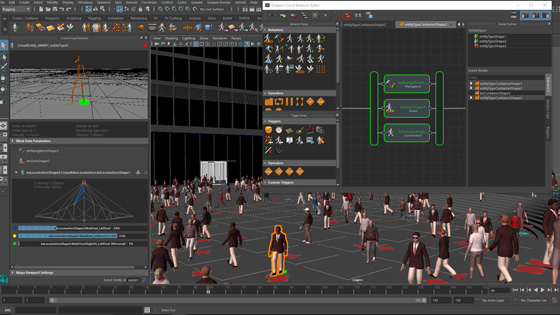
Check your shot before rendering
No need to wait long hours for a render only to realize you have made a mistake. Golaem provides an advanced previsualization mode, keeping the viewport interactive while displaying skinned mesh on all your characters.
Instantly inspect what a character is doing by selecting him. Display information in the viewport, check motion blending in the Visual Debug panel, or open the Behavior Editor to see running behaviors and triggers.
More aboutpreviz
Pipeline Friendly
Golaem is well integrated in Maya, compatible with major renderers. It can replay simulations in many DCCs or export to FBX/Alembic. USD support makes it usable in many workflows or unsupported DCCs.
Golaem provides a MEL/Python API, as well as a C/C++ SDK to read simulation caches.
For your FX team, Golaem can generate locators and/or colliders, or you can replay the simulation in Houdini.
More aboutpipe & FX
World Class Support
We have the best customer support you will ever find. And we mean it.
We cannot count the number of thank you notes from customers telling us that our support is the best one they have dealt with.
Testimonials